.png?v=1663655544 "www.rchobby-jp.com")



説明:
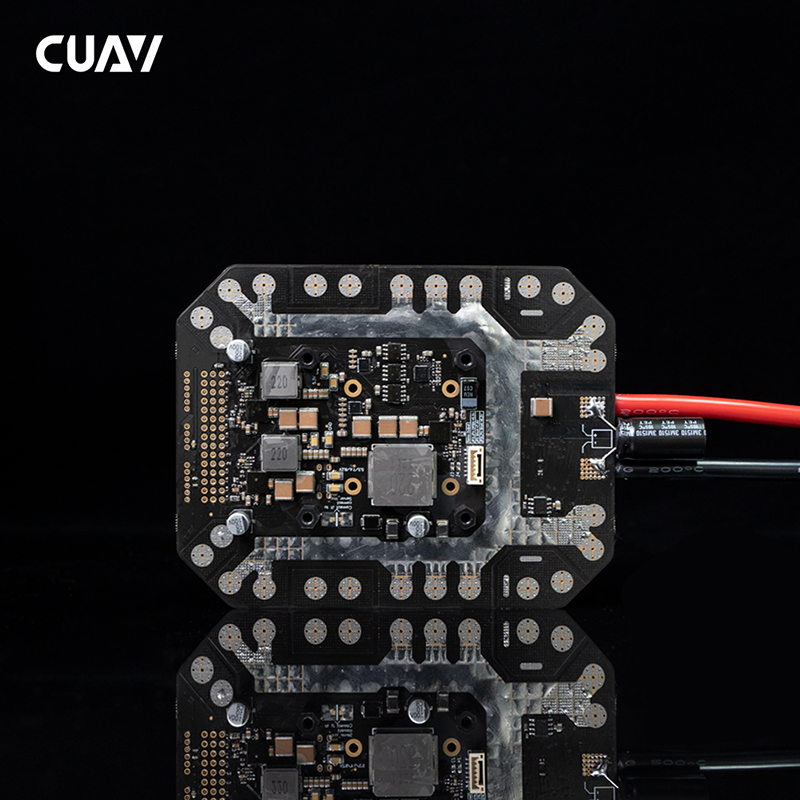
CAN PDB は、フライト コントローラー ボードの機能と電源モジュールを組み合わせた、新しい統合型フライト コントローラー ボードです。
COREと組み合わせると、ヘリコプター/飛行機/ヘリコプター/VTOL/無人車両/ローバーなどの複数のタイプの機器に自動操縦機能を提供し、10チャンネルの冗長主電源と88 W 5/12V電源出力を同時に提供できます。
回路設計とハードウェアの製造材料の両方で、CAN PDB は優れています。自社開発のTTIアルゴリズム。
これは、あらゆるデバイスに最大 180 A の連続動作電流を供給できると同時に、精密機器に匹敵する 0.1 A 電流、0.05 V 電圧の高精度測定を提供します。
*V5+/X7+/X7+PROのコアは別売りです。
特徴:
14 ~ 60 V の電圧入力、110 A の電流をサポートします。
0.1A、0.05Vの電力測定精度
14 個の PWM 出力
5V/6A および 12V/4A の安定化出力
内部抵抗を低減するために厚くされた錫メッキ PCB
電源インジケーター LED、バッテリー電圧ステータスを視覚的に表示

CAN PDB は、CORE フライト コントローラーの多機能ベースボードで、豊富なインターフェイスを提供し、パワー モジュールや配電ボードの機能を統合し、10 ~ 60 V の電圧入力をサポートし、最大 110 A の連続動作電流を提供します。自社開発のITTアルゴリズムを採用し、0.1Aおよび0.05Vの高精度電力検出を備えています。 10 個の電力出力溶接ポイントがあり、5V/6A および 12V/4A の安定化出力を提供して外部デバイスに電力を供給します。 V5+、X7+、XのCOREモジュールをサポート

V2.5アップデート
PPMインターフェイスの追加により、リモコン受信プロトコルのサポートが強化されます。
出力がネジ固定から溶接プロセスにアップグレードされ、接触不良による発熱や振動によるネジの緩みのリスクが軽減されます。



インターフェイス定義 v2.8C

重量87g(電源ケーブル含む)


ハードウェア設定パラメータ
| プロセッサー | STM32F412 100Mhz 512K フラッシュ 256K RAM |
| 入力電圧 | 10~62V(3-15S Lipo) |
| 電流範囲の正確な測定 | 0~110A |
| 最大電流範囲 | 0~180A |
| 5V電圧レギュレータ出力 | 最大6A安定5A |
| 12V電圧レギュレータ出力 | 最大4A、安定3.5A |
| チャンネル数 | 14 |
| 制御受信信号サポート | SBUS/DSM/PPM 信号入力 |
| コアサポート | V5+ / X7 / X7 Pro CORE |
| 対応機種 | APMおよびPX4ファームウェアをサポートし、固定翼機、3-8マルチローター、ヘリコプター、VTOL、無人車両、無人船など |
| サポートファームウェアバージョン | ArduPilot ファームウェア 4.0.0 以降 Px4 ファームウェア 1.11.0 以降 |
| 作業温度 | -20~+100℃ |
| 商品サイズ(L*W*H) | 120x100x12mm |
| 重量 | 163g(ケーブル含む) |
| ケーブル長さ | 30cm(端子含まず) |
| USBインターフェイス | 1(Type-C) |
| UARTポート | 5(gps/uart4/telem1/telem2/debug含む) |
| CAN標準バス | 2 |
| I2Cバス | 3 |
| SBUS/DSM入力 | 1(デュポンジョイント) |
| PPM入力 | 1 |
| PWM出力 | 14(デュポンジョイント) |
| ACC3.3 | 1 |
| ADC6.6 | 1 |
| SBUS出力 | 1(X7、X7 Pro CORE使用時は無効なインターフェイス) |
| RSSI | 3.3Vアナログ電圧 |
| DSU7 | 1 |
イントロ
Autopilot CORE シリーズ ユニットには、オートパイロットのすべての機能が含まれています。ユーザーは、CORE ユニットのインターフェイス定義に従って独自のオートパイロット ベースボードを設計することも、コロケーション用に当社の CAN PDB 製品を購入することもできます。対応する自動ロットユニットの異なるモデルの CORE ユニットのパラメータを確認してください。
注意
Core シリーズ製品にはオートパイロット ベースボードは含まれていません。購入者は、独自のベースボードを設計するか、当社の CAN PDB を購入して使用する必要があります。
購入する前に、営業担当者に問い合わせて、コア インターフェイスの定義を入手してください。
