.png?v=1663655544 "www.rchobby-jp.com")


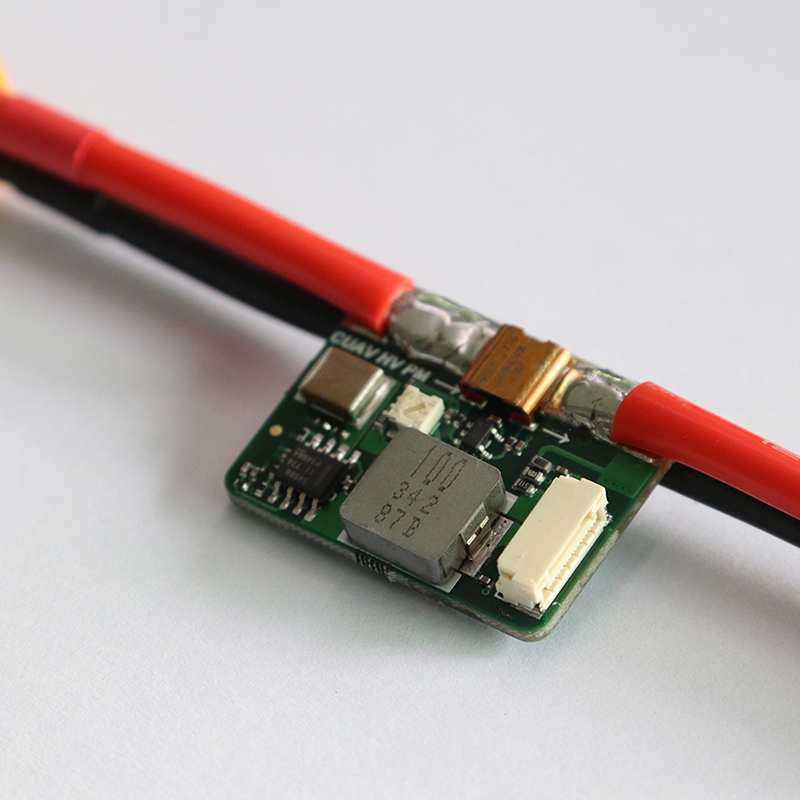
特徴
1. より高い入力電圧をサポート: 10v-60v (3s~14s バッテリー)
2. より正確な電流および電圧検出: 電圧検出精度: +-0.1v、電流検出精度: +-0.2aA
3. より高いパワーポート出力電流をサポート: 5A 最大 (検出) 電流: 60A
主な機能
1 飛行制御装置に電力を供給するために、5V の電圧出力と最大 5A の電流を供給します。
2. 現在の電圧を検出し、アナログ信号を飛行制御装置に出力します。
3. 現在のシステム電流を検出し、アナログ信号を飛行制御装置に出力します。
PIX 飛行制御 ADC の最大検出電圧は 3.3 であるため、サポートできる最大検出電流は 60A です。
標準サイズ:
モジュールサイズ: 320mm*20mm
製品重量: 29g
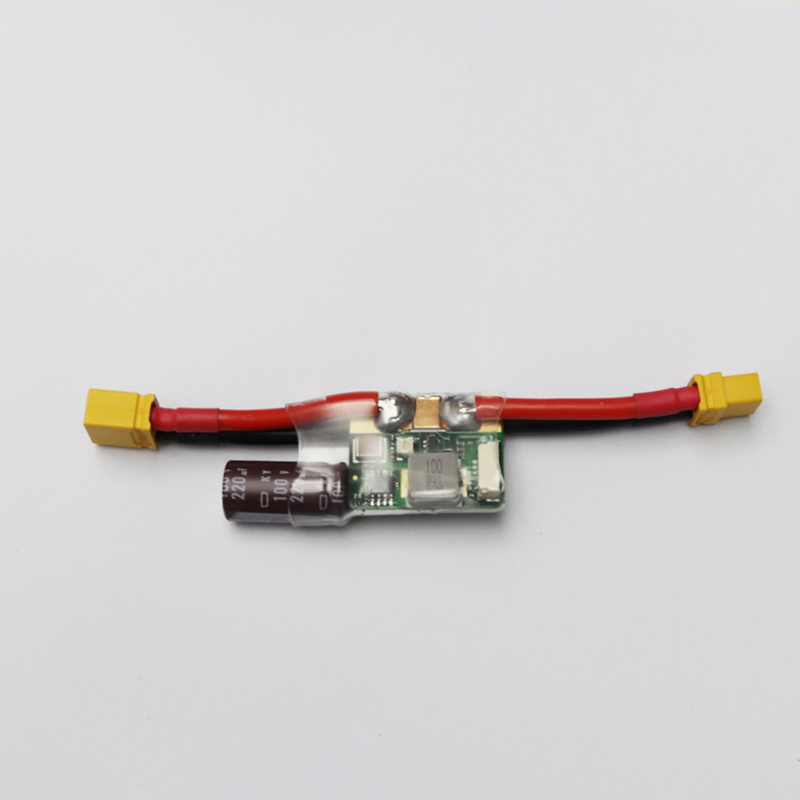
内容品:
HV-PMパワーモジュール(XT60溶接コネクタ)*1
データケーブル*1
梱包袋*1
地上局の設定:
USBまたはテレメトリーで地上局に接続します
初期設定→オプションのハードウェア→バッテリーテスター
モニターの選択: 4; センサー: 0; APM バージョン: 4; 電圧比: 18; ボルトあたりのアンペア: 24
手動電圧校正
PM モジュールはアナログ センサー デバイスであるため、ずれがある可能性がありますから、パラメーターを校正して精度を向上させることができます。
マルチメーターまたは 電圧テスター (電圧の校正に使用) 電圧を校正する手順:
1: バッテリーから電源を投入し、地上局に接続します。
2: マルチメーターまたは電圧テスターを使用して現在のバッテリー電圧を測定します。
センサーのバージョンを 「0」 として選択し、「測定されたバッテリー電圧」に現在測定されている電圧を入力してください。
マウスをクリックするか、TAB キーを押すだけで、地上ステーションが分圧比係数を自動的に計算し、自動的に保存して飛行制御装置に書き込みます。
4: 校正が完了しました。電流を校正する必要はありません。


